
- 首页
- |
- 服务
- |
- 软件工程服务
- |
- ADAS 与自动驾驶软件工程服务
- |
- 车辆环境模型
车辆环境模型
用于自动驾驶的软件模块
通过传感器数据融合,构建汽车周围环境的全面视图。
车道保持到完全自动驾驶等辅助与驾驶功能依赖于对车辆静态与动态环境的精准信息。融合传感器数据后,可获取关于其他交通参与者动态、静态环境、道路结构与交通规则的信息。我们提供即插即用及定制软件模块,助您以较低的投入与成本,轻松开展驾驶功能开发。
优势
加速功能开发
经验证的软件模块为您的功能开发打下坚实基础。
节省宝贵时间与降低费用
可专注于自动驾驶系统中差异化的部分,从而缩短产品上市时间。
为独特功能铺路
硬件无关、可配置的模块便于不同车辆平台间迁移。
使用即用型模块创建您的环境模型,或借助我们卓越的工程能力获益。
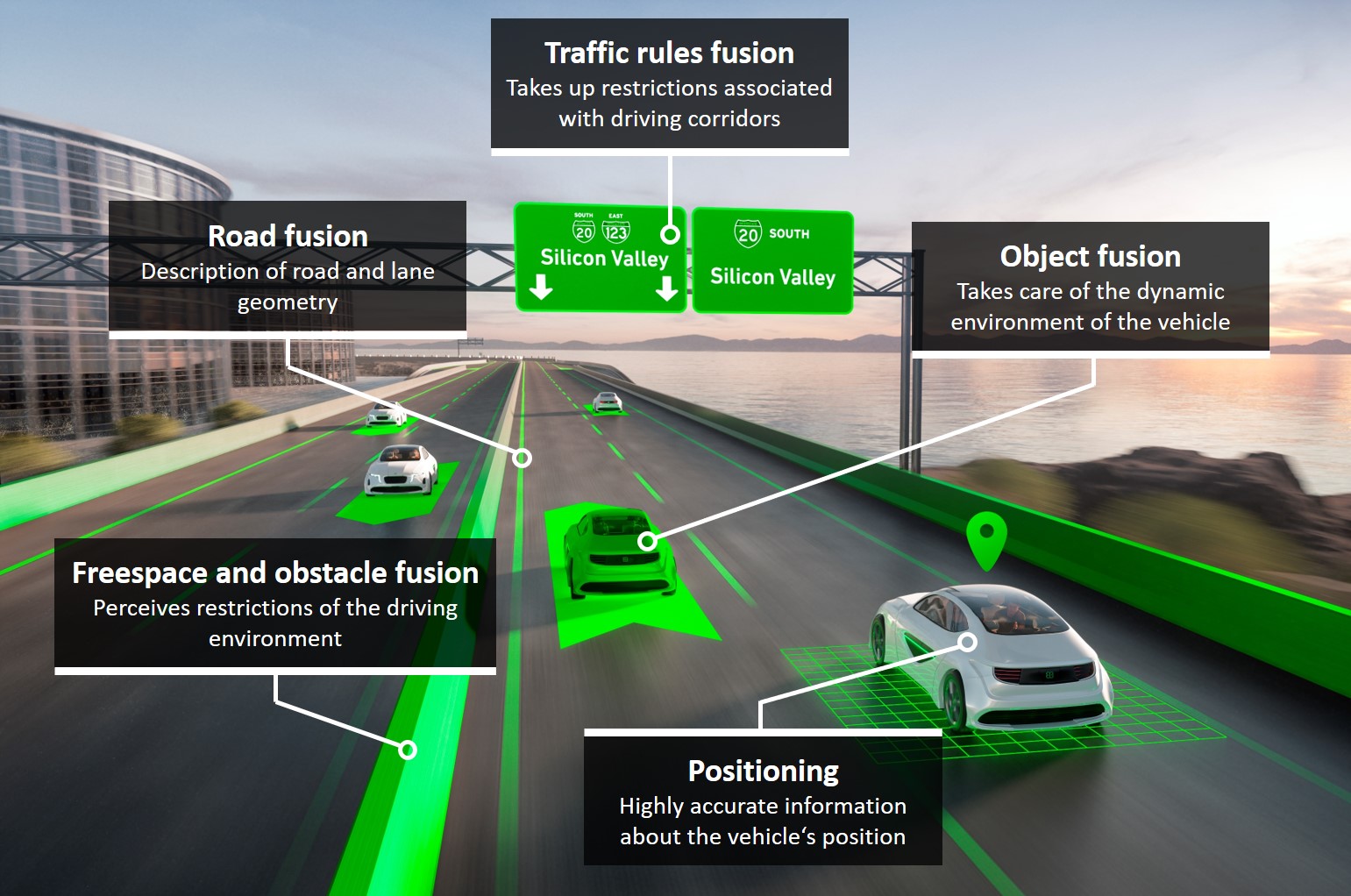
Elektrobit 提供的模块
- 交通规则融合(Traffic rules fusion) – 获取与行驶走廊相关的限制信息。
- 道路融合(Road fusion)– 描述道路与车道几何结构。
- 目标融合(Object fusion)– 处理车辆周围的静态与动态环境。
- 空旷空间与障碍物融合(Freespace and obstacle fusion)– 感知驾驶环境中的限制因素。
- 定位(Positioning)– 提供车辆位置的高度精确数据。
主要特性
- 硬件与传感器无关,适配多个平台。
- 为功能开发者提供清晰易用的 API。
- 支持集成到现有或新开发的驾驶系统,或作为客户功能的一部分集成。
- 可作为环境模型整体的单独库交付。